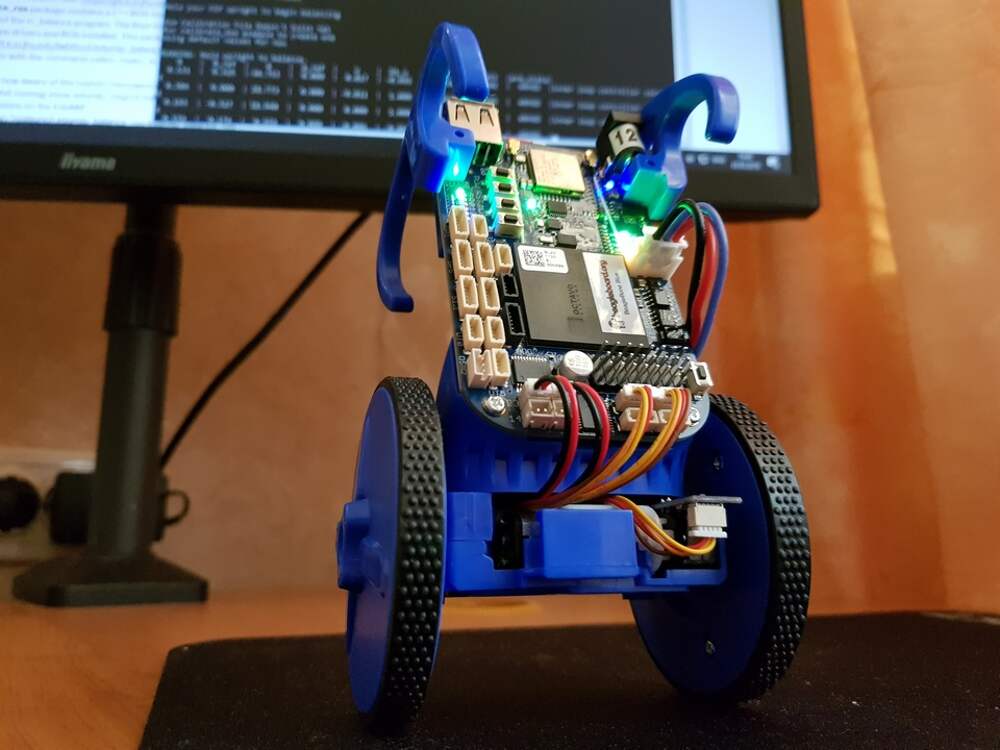
Комплект для сборки самобалансирующего робота EduMip на основе BeagleBone Blue. Распаковка и сборка. Часть 1
Робот может держать баланс на двух колесах, довольно шустро ездить. На борту полноценный linux, есть wifi. Программировать можно через web интерфейс. Есть инструкции и исходники по запуску на нем ROS. В общем море возможностей для творчества.Читать дальше →
...Далее